Linked list in TwinCAT - Part 3
In the last part of this blog series, we use our linked list in basic application and test the performance of the extra overhead. All the code from this blog series can be found here.
Locking cars
Imagine we have a collection of cars. Some cars you own in your own garage. All the rest are part of a company’s car fleet. Both you and the company likes to have the ability to lock and unlock all owned cars.
- FB_Car
First we create an interface for our cars. It’s not necessary, but it will improve type safety when multiple function block definitions (classes) are used.
INTERFACE ITF_Car
PROPERTY p_Locked : BOOL
The car function blocks is very simple. It contains a local variable to store the lock state. Implements ITF_Car interface, where the p_Locked property is directly mapped to the internal state. To make online viewing easy we add the {attribute 'monitoring' := 'call'} pragma (see InfoSys) to this property. The function block also extends our previous created FB_LinkedList_Node, to make all cars a potential list node.
{attribute 'hide_all_locals'}
FUNCTION_BLOCK FB_Car EXTENDS FB_LinkedList_Node IMPLEMENTS ITF_Car
VAR
Locked: BOOL;
END_VAR
{attribute 'monitoring' := 'call'}
PROPERTY p_Locked : BOOL
//----Get----
p_Locked := Locked;
//----Set----
Locked := p_Locked;
- FB_CarGroup
The car group function block will be our master node of the linked list. It extends FB_LinkedList_Master and also implements ITF_Car. When writing the lock property it will (un)lock all cars! Reading it will return if all cars are locked. It is possible to give this property another name like “p_LockAll” but by using the same interface and property name you create an abstraction between a single car and a car group. Neat!
FUNCTION_BLOCK FB_CarGroup EXTENDS FB_LinkedList_Master IMPLEMENTS ITF_Car
VAR
END_VAR
{attribute 'monitoring' := 'call'}
PROPERTY p_Locked : BOOL
//----Get----
VAR
i: UINT;
itfCar: ITF_Car;
END_VAR
p_Locked := TRUE;
FOR i := 0 TO ListLength DO
IF __QUERYINTERFACE( mListGetNode(i), itfCar) THEN
p_Locked R= NOT itfCar.p_Locked;
END_IF
END_FOR
//----Set----
VAR
i: UINT;
itfCar: ITF_Car;
END_VAR
FOR i := 0 TO ListLength DO
IF __QUERYINTERFACE( mListGetNode(i), itfCar) THEN
itfCar.p_Locked := p_Locked;
END_IF
END_FOR
- __QUERYPOINTER & __QUERYINTERFACE
The __QUERYPOINTER and __QUERYINTERFACE are both extensions of IEC61131-3. They aren’t used a lot, but they provide some interesting OOP mechanisms. These operators make it possible to make a clear separation with the linked list implementation and the function block that extends the list.
__QUERYPOINTER will return the pointer to the function block that implements the given interface. If we ask the master node to return the node interface of the first element. We can now convert that node interface to a pointer to the containing function block. In our example a pointer to FB_Car. By having the pointer we have full control over the car. The return value of this operator is a boolean that let us know if the casting was successful.
For the operator to work, the requested interface need to extend
__System.IQueryInterface. In part 1 we did this with the ITF_LinkedList_Node interface.
The problem with using pointers is that they are not type safe. There is nothing that checks if the returned pointer is a car. It only knows that the function block has implemented the ITF_LinkedList_Node interface. It possible that we expect a car, but it’s actually a bicycle. And calling a car method on a bicycle, will cause an exception, putting your garage on fire!
The solution: __QUERYINTERFACE. This operator does the same thing but goes one step further. It checks if the found function block implements another interface. Basically we ask if it can convert the node interface to a car interface. If it’s a yes, we lock the car. If it’s a no because the node is a bicycle, we do nothing. This gives us the power to mix types in the linked list. If this isn’t OOP, then I don’t know what OOP is.
Our first list
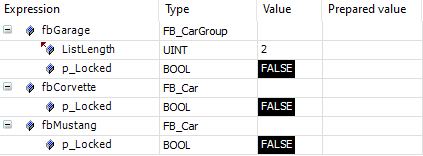
Now that everything is explained lets just build our garage with our favorite cars. And test the functionality to lock a single car, or all cars.
PROGRAM MAIN
VAR
fbGarage: FB_CarGroup;
fbCorvette: FB_Car := ( p_LinkMaster := fbGarage );
fbMustang: FB_Car := ( p_LinkMaster := fbGarage );
END_VAR
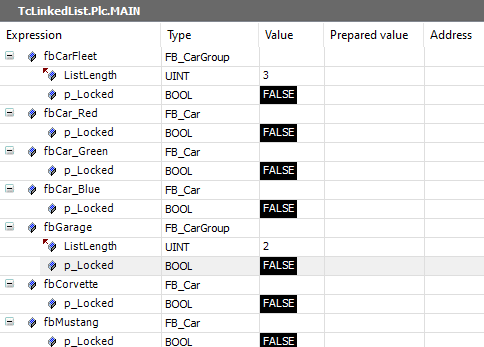
Instead of always mapping a car to a car group, lets create a default list fbCarFleet that all cars are automatically added to. It’s still possible to move cars explicitly to our private garage.
PROGRAM MAIN
VAR
fbCarFleet: FB_CarGroup;
fbCar_Red: FB_Car;
fbCar_Green: FB_Car;
fbCar_Blue: FB_Car;
fbGarage: FB_CarGroup;
fbCorvette: FB_Car := ( p_LinkMaster := fbGarage );
fbMustang: FB_Car := ( p_LinkMaster := fbGarage );
END_VAR
To make this work, we add a simple FB_init to FB_Car. We don’t need to think about online changes as the child linked list function block handles this on its own. When the master node is defined explicitly, FB_init will first add it to the default list. After the initial assignment the node is moved to the new list.
METHOD FB_init : BOOL
VAR_INPUT
bInitRetains : BOOL; // if TRUE, the retain variables are initialized (warm start / cold start)
bInCopyCode : BOOL; // if TRUE, the instance afterwards gets moved into the copy code (online change)
END_VAR
p_LinkMaster := MAIN.fbCarFleet;
The result:
For the last example we will move nodes from one list to another. Lets start selling and buying cars from our private garage the the car fleet.
PROGRAM MAIN
VAR
fbCarFleet: FB_CarGroup;
fbCar_Red: FB_Car;
fbCar_Green: FB_Car;
fbCar_Blue: FB_Car;
fbGarage: FB_CarGroup;
fbCorvette: FB_Car := ( p_LinkMaster := fbGarage );
fbMustang: FB_Car := ( p_LinkMaster := fbGarage );
//Triggers
xSellCar: BOOL;
xBuyCar: BOOL;
END_VAR
VAR_TEMP
{attribute 'hide'}
pCar: POINTER TO FB_Car;
END_VAR
IF xSellCar THEN
xSellCar := FALSE; //Reset trigger
//Get last car in the garage list and sell it to the fleet
IF __QUERYPOINTER(fbGarage.mListGetNode( fbGarage.ListLength - 1), pCar) THEN
pCar^.p_LinkMaster := fbCarFleet;
END_IF
END_IF
IF xBuyCar THEN
xBuyCar := FALSE; //Reset trigger
//Get first car from the fleed and add it to the garage
IF __QUERYPOINTER(fbCarFleet.mListGetNode(0), pCar) THEN
pCar^.p_LinkMaster := fbGarage;
END_IF
END_IF

Performance
We can expect that the linked list with all the extra code will be slower than iterating over an array. To understand how much different, create a simple program that iterate over 10,000 cars.
PROGRAM PERFORMANCE
VAR CONSTANT
iSize: INT := 10000;
END_VAR
VAR
fbMaster: FB_CarGroup;
fbCars: ARRAY[0..iSize-1] OF FB_Car := [ iSize(( p_LinkMaster := fbMaster )) ];
i: INT;
itfCar: ITF_Car;
Profiler_List: PROFILER;
Profiler_Array: PROFILER;
END_VAR
MAX_AVERAGE_MEASURES := 100;
//-----Linked list iteration----
Profiler_List( START := TRUE );
FOR i := 0 TO iSize - 1 DO
IF __QUERYINTERFACE( fbMaster.mListGetNode( i ), itfCar) THEN
itfCar.p_Locked := TRUE;
END_IF
END_FOR
Profiler_List( START := FALSE );
//-----Array iteration----
Profiler_Array( START := TRUE );
FOR i := 0 TO iSize - 1 DO
fbCars[i].p_Locked := TRUE;
END_FOR
Profiler_Array( START := FALSE );
The result are 50µs for array iteration and 427µs for list iteration. A factor of 8.5 times slower. As long as the list isn’t to big, this won’t cause a big issue on modern hardware.
Closing word
Linked list bring some interesting possibilities to plc programming that were hard to achieve before because of the static memory allocation. The basic function blocks can be extended and reused in different ways. Some inspiration:
- Have the master node embedded and encapsulated in every node, by defining it as
VAR_STATvariable. This way the list is protected from outsiders. I like to see this as a hivemind in a swarm. - Mix node types in one list. Have a group of all actuators (servos, pneumatic valves, …) in a machine station, and be able to reset them all.
- Make it possible to link a node to multiple lists. This way you can group all actuators in a station, but also group all servos in the whole machine together to act on them.
- Create a linked list of linked lists.
- Extend the codebase to have more control over the list order.
- Create a function block for a XPlanar or XTS mover and link them to the station they are currently part of.
- …
As final words I wanted to state that this work isn’t peer reviewed and hasn’t been tested in production. It’s still possible that it contain bugs that can trigger an exception. Use with care, improve and re-share!